Whenever we design a drone, the most important part of it is the flight controller. The stability and function of the drone depend only on the flight controller. Nowadays, there are many flight controllers in the market, so it becomes very difficult to select a flight controller. We select drone flight controllers based on what we want to do with the drone. For example, if we are going to design a drone that will drop some items at a given location, we have to use a flight controller that can reach the exact GPS location. Here, we are going to compare some mid-price range flight controllers.
What is a flight controller board?

The flight controller is the brain of the drone, which controls the motors and ESCs in the drone. It is an electronics board in which sensors, processors, communication protocols, and transmitter pins are installed. A flight controller controls every aspect of the drone. It moves the drone by changing the motors' RPM. It's a control system that inputs sensor data and directs the drone's flight. The purpose of the flight controller is to stabilize the quadcopter during flight. To do so, it receives signals from sensors and sends them to the processor, which then sends the control signal to the ESCs, which in turn instructs the ESCs to make fine adjustments to the motor rotational speeds, stabilizing the craft. When this data is processed, it is sent to the ESCs, which adjust the rotational speed of each motor to control flight orientation (yaw, right, left, up, down, backward, forward).

Now, let’s see how to choose the best flight controller board for your drone.
read more : How drone works?
How to choose the drone controller?
Choosing the best drone board that meets all of your requirements is a difficult task. There are numerous drone controller boards available, each with its own set of advantages and disadvantages.
Drone boards have come a long way in the last decade thanks to technological advancements. To create reliable and powerful drones, manufacturers are relying on secure and effective microcontrollers.
Since the era of the KK2 boards, technology has achieved some remarkable achievements. The original KK2 boards, as well as their successors, were more significant than their modern counterparts, as they were small in size but packed a punch in terms of processing power. While there are several factors to weigh when buying a drone controller board, this guide will walk you through how to choose the best board controller that fits your needs.
The drone flight controller board can be chosen on many factors as follows
Before moving on to the factors, we should first, understand that a flight controller board has several sensors for perceiving the motion of the device and the handler commands. With this information, it can regulate the speed of the engines and make the drone move appropriately.
These are the main features of a drone board.
1. Microcontroller
When you want to choose a flight controller board, the operating speed matters a lot. So, the microcontroller plays a very important role in the speed of operation. When the onboard sensor or from any other input source gives the present time parameters of the drone, the data has to be processed quickly and respond to the actuators as fast as possible. So, the microcontroller has to be capable of doing high-speed operations.
Below is the list of the microcontroller used in different flight controller boards:
- KK 2.1.5 flight controller board: Atmel Mega644PA 8-bit AVR
- Ardupilot APM 2.8 flight controller board: ATMEGA328P
- OpenPilot CC3D flight controller: STM32F4 32-bit series
- Ardupilot APM 2.6 flight controller: ATMEGA2560 and ATMEGA32U-2
read more : What are drones? A-Z Guide Of Assembly to Flying
2. Firmware
The firmware in the drone matters a lot when you are building a drone. The firmware is software, which tells the microcontroller to perform a task in a particular way. So, in the future, if you are planning to modify the code and change certain fixed parameters of the drone or you want to calibrate a parameter in the drone. Then firmware plays a very important role in the drones.
3. Sensors
The sensors are like sensory organs to the drone. As like we humans have many sensory organs which sense the physical change and send the message to the brain, the same are the sensors in the drones. The flight controller board comes with a few in-built sensors. Such as accelerometer, gyroscope, and temperature.., these sensors are used to sense the physical parameters and provide data to the microcontroller, which is then processed as per the firmware written. Sensors are most commonly used for measuring pitch, yaw, roll, etc..,
Below is the list of the sensors used in different flight controller board:
- KK 2.1.5 flight controller board: MPU6050 gyroscope and accelerometer.
- Ardupilot APM 2.8 flight controller board: 3-Axis Gyrometer, Accelerometer, High-performance Barometer.
- Open pilot CC3D flight controller board: 3-Axis Gyrometer, Accelerometer.
- Ardupilot APM 2.6 flight controller board: 3-Axis Gyrometer, Accelerometer, High-performance Barometer.
4. Communication protocol
The communication protocols matter a lot when it comes to the flight controller board. As we know there are many embedded systems protocols. Like, UART, I2C, SPI, CAN, PWM, etc.., The sensor senses the physical parameter data and transfers it to the microcontroller to process it. So to transfer the data, there should be some kind of communication protocol that has to be used. To send any data. This communication may occur through I2C, SPI, UART, PWM, etc. But the microcontroller reads the data through the communication protocol and processes the data.
Below are the communication protocols available in different flight controller boards:
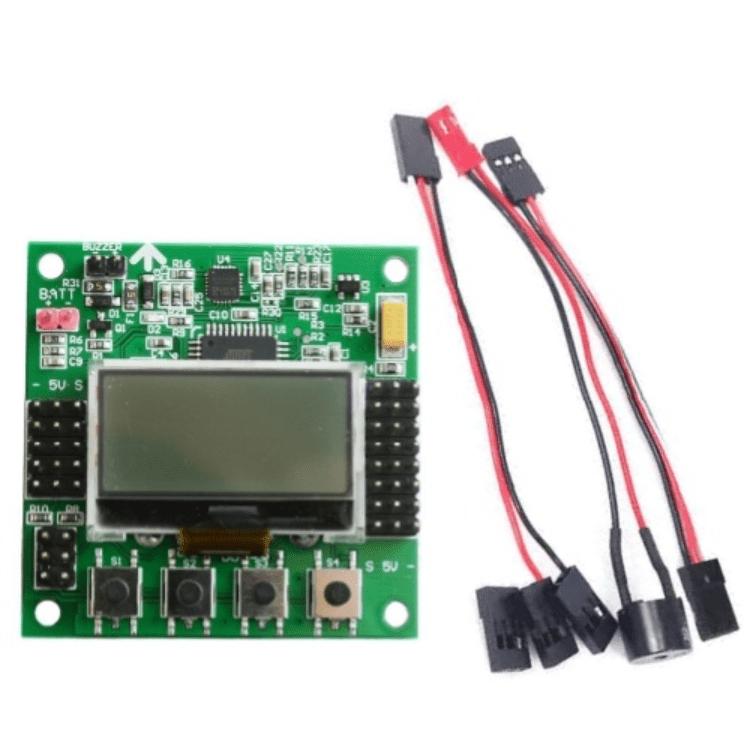
- KK 2.1.5 flight controller board: This board comes with a built-in LCD display and 4 buttons to configure the setting for the flight controller board.
- Ardupilot APM 2.8 flight controller board: I2C, SPI, PWM, PMU, and UART.
- Openpilot CC3D flight controller board: UART, I2C, SBUS.
- Ardupilot APM 2.6 flight controller board: UART0, UART1, I2C.
read more : Affordable Drone Batteries
5. Size and weight
The size and the weight is an important factors to be considered when selecting a flight controller board. The lesser the weight on the drone results in a more efficient flight. But when choosing a flight controller board, the size and the weight play a very important role in the drone build. Always choose a board with less size and weight for a better flight.
Below are the size and weight of the different flight controller board
- KK 2.1.5 flight controller board: Length - 51 mm , Width- 51 mm , Height - 12 mm , Weight - 50 grams.
- Ardupilot APM 2.8 flight controller board: Length - 70 mm , Width - 45 mm , Height - 15 mm , Weight - 80 grams.
- Openpilot CC3D flight controller board: Length - 40 mm , Width - 40 mm , Height - 18 mm , Weight - 28 grams.
- Ardupilot APM 2.6 flight controller board: Length - 111.8 mm , Width - 86.4 mm , Height - 25.4 mm , Weight - 68 grams.
6. Input Voltage
The input voltage of the flight controller matter a lot because the drones are battery-powered devices. If the flight controller board requires voltage more than the battery voltage, then an external voltage booster circuit has to be used. So it will be better if the flight controller which is chosen should be of better input voltage.
Below are the input voltages of different flight controller board:
- KK 2.1.5 flight controller board: 4.8~6.0 VDC
- Ardupilot APM 2.8 flight controller board: 12~16 VDC
- Openpilot CC3D flight controller board: 5 VDC
- Ardupilot APM 2.6 flight controller board: 12~16 VDC
read more : Assembling the DM002 Drone
7. Power consumption
As we know the drone used brushless motors to rotate the drone propellers to fly. The power consumption is the main factor to be considered while selecting a flight controller board. As the drone is a battery-powered device power consumption should be considered a priority. The lesser the power consumption, the more the efficiency of the drone.
Best flight controller boards for Drones
1. KK 2.1.5 flight controller board

The KK2.1.5 Multi-Rotor controller is a flight control board for multi-rotor aircraft (Tricopters, Quadcopters, Hexcopters, etc). Its purpose is to stabilize the aircraft during flight. To do this it takes the signal from the 6050MPU gyro/acc (roll, pitch, and yaw) and then passes the signal to the Atmega644PA IC. The Atmega644PA IC unit then processes these signals according to the user's selected firmware and passes control signals to the installed Electronic Speed Controllers (ESCs). These signals instruct the ESCs to make fine adjustments to the motors rotational speed which in turn stabilizes your multi-rotor craft. The kk 2.1.5 flight controller
board also uses signals from your radio systems receiver (Rx) and passes these signals to the Atmega644PA IC via the aileron, elevator, throttle, and rudder inputs. Once this information has been processed the IC will send varying signals to the ESCs which in turn adjust the rotational speed of each motor to induce controlled flight (up, down, backward, forwards, left, right, yaw).
Specification
- Model: KK2.1.5
- Processor: Atmega
- Gyro/Acc: InvenSense Inc.
- Auto-level: Yes
- Input Voltage: 4.8-6.0V
- AVR interface: standard 6 pin
- Signal from Receiver: 1520us (5 channels)
- Signal to ESC: 1520us
Features
- Most stable kk 2.1.5 flight controller ever.
- 6050 MPU system based.
- Easy graphical interfacing with the receiver.
- In-Builtlt firmware.
- Easy to use for beginners.
read more : How to build a quadcopter drone at home
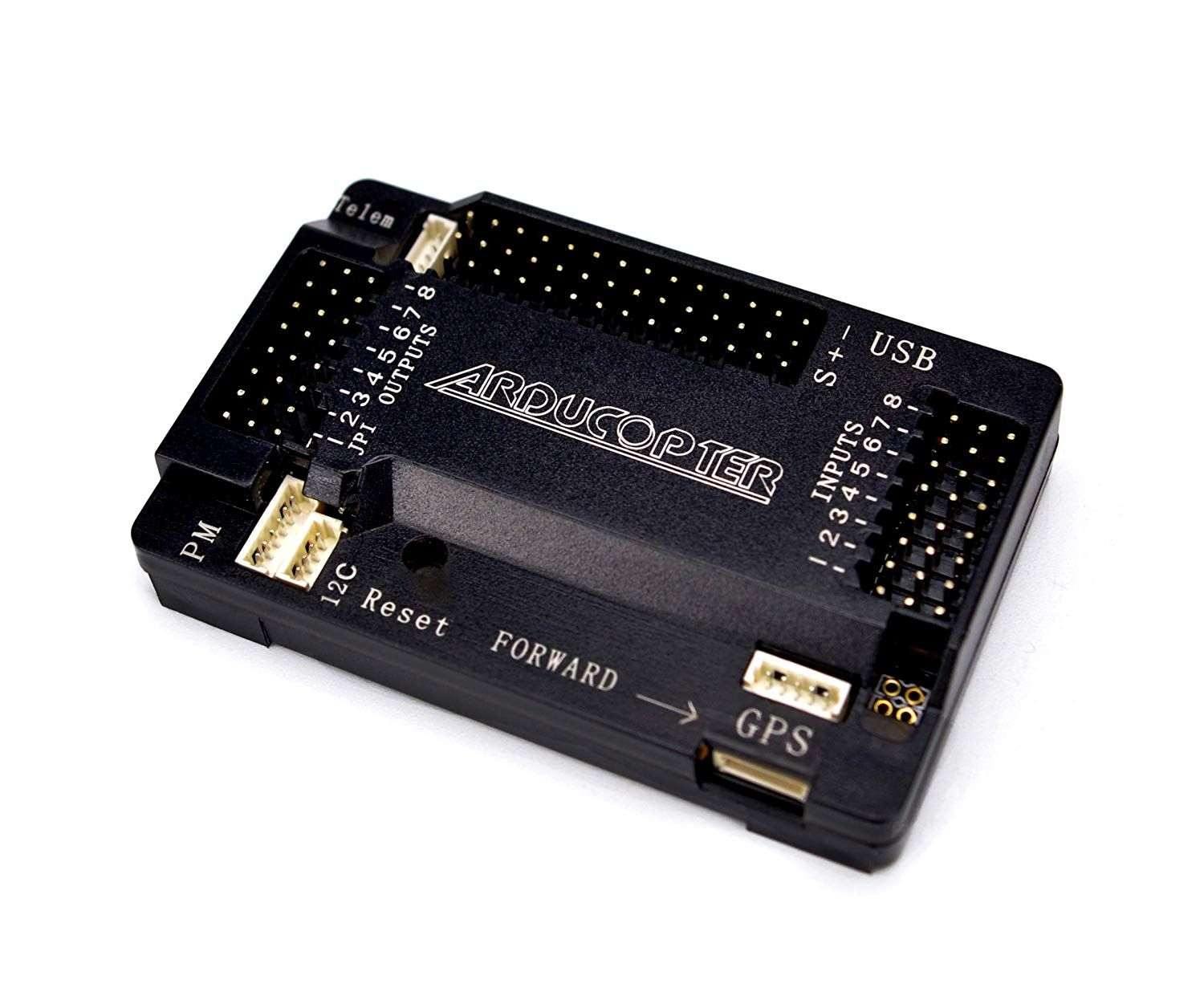
2. Ardupilot APM 2.8 flight controller board

Ardupilot APM 2.8 flight controller board is the new APM 2.8 autopilot module. The sensors are exactly the same as with APM2.6, this version is ideal for use with multi-copters and rovers. The APM 2.8 is a fully open-source autopilot system that was the bestselling technology that won the prestigious 2012 Outback Challenge UAV competition. It allows the user to turn any fixed, rotary-wing, or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints. Available with top or side connectors. This revision of the board is designed for vehicles (especially multi-copters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. It's often easier to mount APM far enough away from the motors and ESCs on fixed-wing aircraft to avoid magnetic interference. Because the APM 2.8 does not have an onboard compass, it is designed to be used with the 3DR uBlox GPS with Compass, which can be mounted further away from noise sources than the APM itself.
Specification:
- Model: APM 2.8
- Power Supply: LP2985-3.3
- Port: MUX (UART0, UART2, mnnI2, and OSD are optional, OSD is the defaulted output).
- Input Voltage: 12~16V DC
- Sensors: 3-Axis Gyrometer, Accelerometer, High-performance Barometer
- Processor: ATMEGA2560 and ATMEGA32U-2
Features:
- Arduino Compatible
- Includes 3-axis gyro, accelerometer, and magnetometer, along with a high-performance barometer
- Onboard 4 MegaByte Data flash chip for automatic data logging
- Optional off-board GPS, uBlox LEA-6H module with Compass.
- One of the first open-source autopilot systems to use Invensense's 6 DOF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions respectively.
read more : How to Choose ESC for Quadcopter
3. Openpilot CC3D flight controller board

The Openpilot CC3D Flight Controller is a powerful and affordable flight controller that is mainly used on mini quadcopters because of its small size. It has many advanced features that you can use if you add a GPS module, even waypoint-based flight, However, most users don’t bother with this for mini quadcopters and just want the basic setup.
Open Pilot is a next-generation Open-Source UAV autopilot. It is a highly capable platform for multi-rotor craft, helicopters, as well as fixed-wing aircraft. It was designed from the ground up by a community of dedicated developers from around the world, with quality, safety, and ease of use as the primary design principles. Simplicity does not come with any compromises either: with no hard-coded settings, a complete flight plan scripting language, and other powerful features, OpenPilot is an extremely capable UAV autopilot platform.
Specification:
- Model: OpenPilot CC3D EVO
- Input Voltage (V): 5V
- Sensors: 3-Axis Gyrometer, Accelerometer
- Processor: Micro-Controller STM32
- Sensor IC: MPU6000
- Micro-SD Card Slot: No
- Dimensions (mm) LxWxH: 40 x 40 x 18 mm
- Weight (gm): 28 grams
Features
- MultiRotor controller with auto-level, including Tri Copters, Quad Copters, and Hexa Copters
- Flybarless Helicopter controller with auto-level
- Fixed Wing UAV controller
- Powerful STM32 32-bit microcontroller running at 90MIPs with 128KB Flash and 20KB RAM
- 3-axis high-performance MEMs gyros and 3-axis high-performance MEMs accelerometer
- Tiny 36mmx36mm 4 layer PCB for superior electrical noise reduction and flight performance.
- Software support for Windows, Mac, and Linux
- Direct high-speed USB support with no drivers required, a truly plug-and-play device.
- Spektrum satellite receiver support
- Futaba S-BUS hardware support and PPM
- Innovative Flexi-port technology for superior port flexibility
- 4Mbits on-board EEPROM for configuration storage
read more : How to fly a quadcopter
4. Ardupilot APM 2.6 flight controller board

The APM 2.6 Multicopter Flight Controller is a complete open-source autopilot system and the bestselling technology that won the prestigious Outback Challenge UAV competition. It allows the user to turn any fixed, rotary-wing, or multirotor vehicle (even cars and boats) into a fully autonomous vehicle; capable of performing programmed GPS missions with waypoints.
This revision of the board has an optional onboard compass, which is designed for vehicles (especially multi-copters and rovers) where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference. (On fixed-wing aircraft, it's often easier to mount APM far enough away from the motors and ESCs to avoid magnetic interference, so this isn't as critical, but APM 2.8 offers more flexibility in that positioning and is a good choice for them as well). This is designed to be used with the 3DR uBlox GPS with Compass so that the GPS/Compass unit can be mounted further from noise sources than APM itself.
Specification
- Model: APM 2.6
- Power supply: LP2985-3.3.
- Port: MUX (UART0, UART2, mnnI2, and OSD are optional, OSD is the defaulted output).
- Input Voltage (V): 12~16 VDC
- Sensors: 3-Axis Gyrometer, Accelerometer, High-performance Barometer
- Processor: ATMEGA2560 and ATMEGA32U-2
- Micro-SD Card Slot: No
- Dimensions LxWxH: 85 x 45 x 15 mm
- Weight: 82 grams
Features
- APM 2.6 is a revision of the APM that makes use of an external compass.
- The APM 2.6 has no onboard compass and is optimized for vehicles where the compass should be placed as far from power and motor sources as possible to avoid magnetic interference.
- APM 2.6 is designed to be used with the 3DR GPS uBlox LEA-6 with Compass module.
- The GPS/Compass module may be mounted further from noise sources than the APM itself.
- APM 2.6 requires a GPS unit with an onboard compass for full autonomy.
read more : How to make quadcopter using Arduino
Conclusion
In this blog post, we have learned that a flight controller board is the brain of a drone, responsible for maintaining stability and controlling its movements. Choosing the Best Flight Controller for Drone can be a daunting task, but by considering factors such as flight style, compatibility, and features, you can find the perfect match for your drone. Whether you're a beginner or an experienced pilot, there are plenty of high-quality flight controller boards available. So, enjoy flying your drone with the best flight controller board suited to your needs. Happy flying!
If you appreciate our work don't forget to share this post and leave your opinion in the comment box.
Please do check out other blog posts about Popular electronics
Check out other related blog posts about Drones: Drone transmitter and receiver , Drone Part List , Drone motors and Getting started with a Quadcopter
Make sure you check out our wide range of products and collections (we offer some exciting deals!)